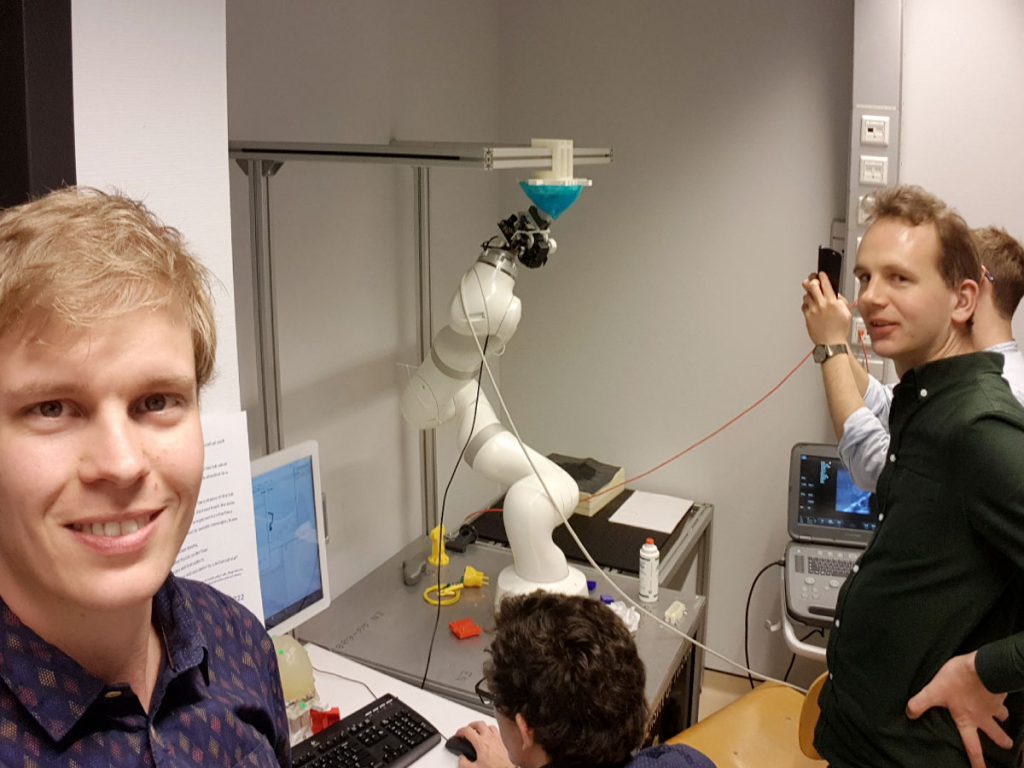
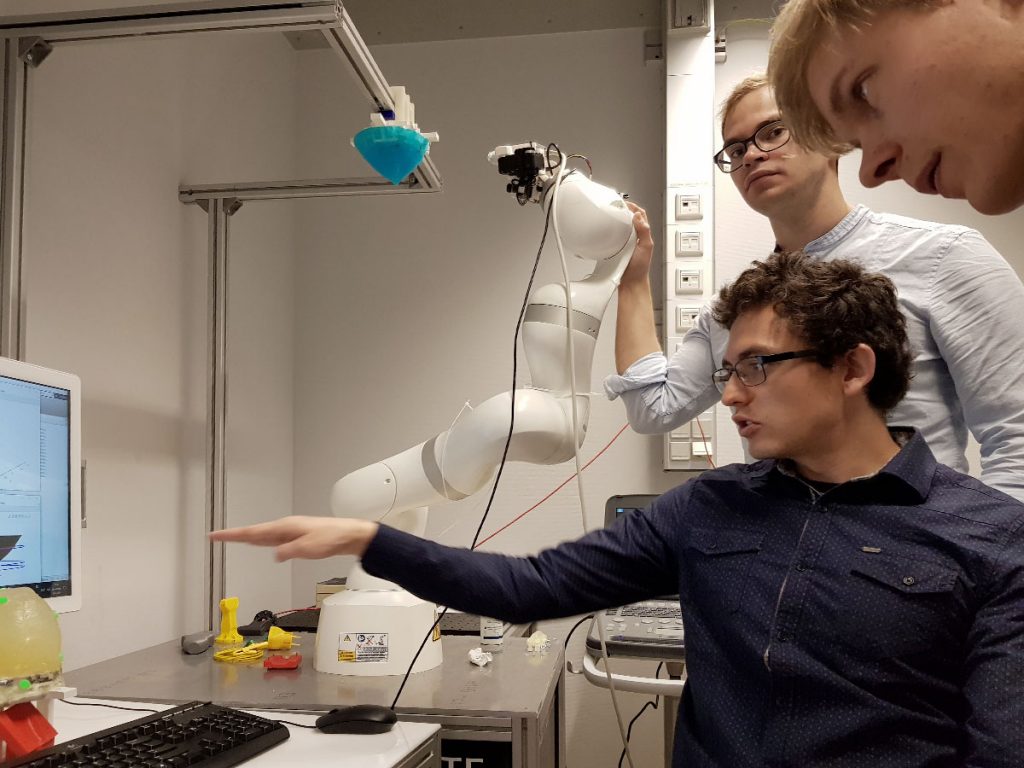
On 14th and 15th of March 2019, several Consortium members gathered at the MURAB Hackathon in Twente to work on the software in the MURAB project and perform data acquisition on breast phantoms.
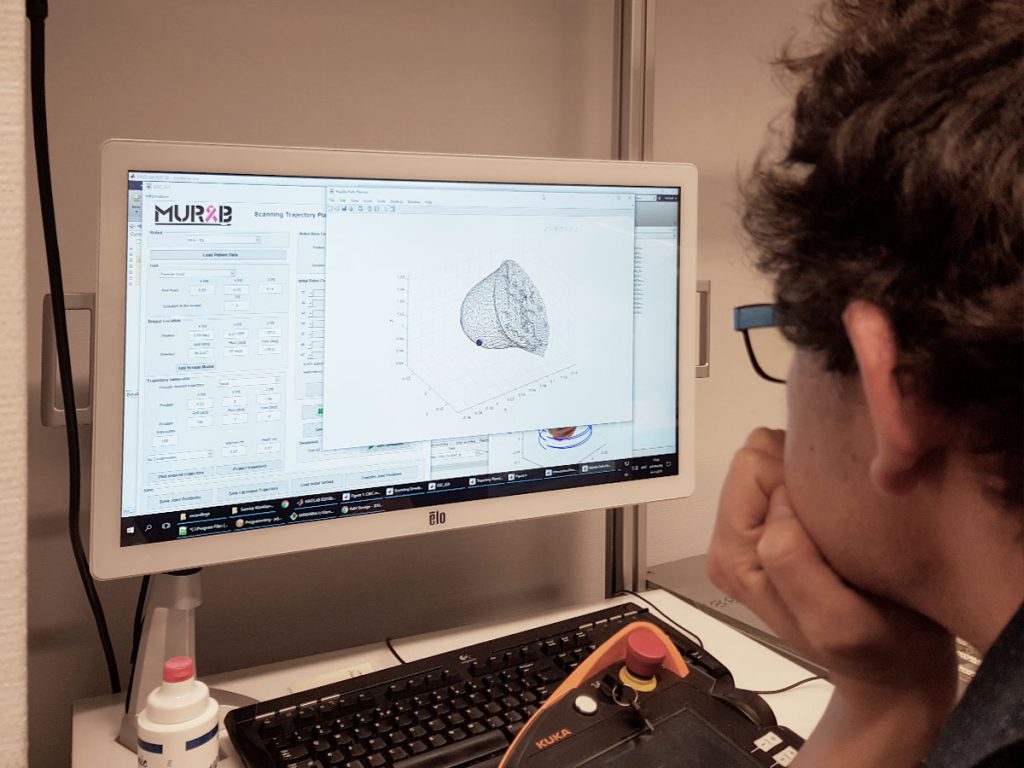
Scanning is performed by an ultrasound probe on the robot arm which follows the breast surface in a spiral motion. It is important that the scanning is done in a safe way, i.e. no excessive forces are exerted by the robot on the breast. If necessary, the robot arm can always be pulled away by the radiologist. Also, the scanning trajectory essentially has to cover the whole breast so that a good MRI-ultrasound reconstruction can be performed.
Furthermore, near the end of the MURAB workflow, a biopsy sample is to be taken from the lesion. All these aspects require sophisticated software routines and a lot of communication between the MURAB partners.
The Hackathon integration week is an excellent method to let several project partners work closely together to tackle a large number of these challenges!